
ros操作系统下载,ROS操作系统下载指南
时间:2024-10-21 来源:网络 人气:
ROS操作系统下载指南

ROS(Robot Operating System,机器人操作系统)是一个开源的机器人软件框架,它为开发者提供了一个强大的平台来构建、测试和部署机器人应用程序。本文将为您详细介绍如何下载和安装ROS操作系统。
一、了解ROS
ROS是一个由众多软件库、工具和功能组成的框架,它允许开发者通过编写代码来控制机器人。ROS广泛应用于工业、科研、教育等领域,是机器人开发领域的事实标准。
二、选择合适的ROS版本
ROS 1(Kinetic Kame、Melodic Morenia、Noetic Nemo等)
ROS 2(Dashing Diademata、Eloquent Elusor、Foxy Fervent等)
选择版本时,请考虑以下因素:
您的项目需求:某些功能可能仅在特定版本的ROS中可用。
您的硬件兼容性:某些版本的ROS可能对硬件要求更高。
社区支持:较新版本的ROS可能拥有更活跃的社区支持。
三、下载ROS
以下是下载不同版本ROS的步骤:
1. ROS 1下载
访问ROS官网(http://wiki.ros.org/ROS/Installation)选择您所需的版本,然后按照以下步骤操作:
选择您的操作系统(如Ubuntu、Fedora等)。
选择您的ROS版本(如Kinetic Kame、Melodic Morenia等)。
下载安装包。
2. ROS 2下载
访问ROS 2官网(https://docs.ros.org/en/ROS%20for%20Windows/)选择您所需的版本,然后按照以下步骤操作:
选择您的操作系统(如Windows、macOS等)。
下载安装包。
四、安装ROS
以下是安装ROS的步骤:
1. ROS 1安装
以Ubuntu为例,打开终端,执行以下命令:
sudo apt update
sudo apt install ros-$ROS_DISTRO-desktop-full
sudo rosdep init
rosdep update
source /opt/ros/$ROS_DISTRO/setup.bash
2. ROS 2安装
以Windows为例,打开命令提示符,执行以下命令:
choco install ros-melodic-desktop
choco install ros-foxy-desktop
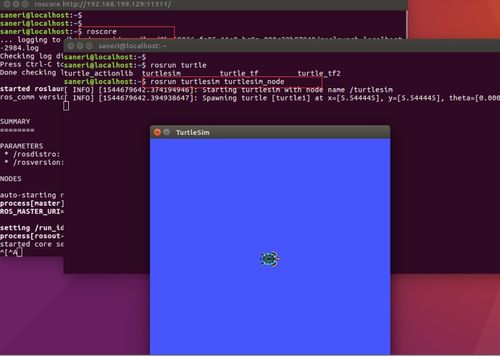
安装完成后,您可以通过以下命令验证ROS是否安装成功:
roscore
通过本文,您已经了解了如何下载和安装ROS操作系统。现在,您可以开始使用ROS开发您的机器人项目了。祝您在机器人开发领域取得成功!
相关推荐
- windows7系统如何设置屏幕保护时间,Windows 7系统如何设置屏幕保护时间
- windows7系统比xp卡,Windows 7系统为何有时会比Windows XP卡顿?
- windows7设置屏幕保护系统,Windows 7系统设置屏幕保护程序详解
- windows7旗舰版电脑系统如何,全面解析与安装指南
- windows7系统usb不显示,Windows 7系统USB设备不显示的常见原因及解决方法
- windows7网络重置系统,解决网络连接问题的实用指南
- windows7系统安装蓝牙驱动,Windows 7系统安装蓝牙驱动教程
- windows7系统自带工具,深入探索Windows 7系统自带工具的强大功能
- windows7系统怎么调节亮度调节,Windows 7系统如何调节屏幕亮度
- windows7系统卡在欢迎界面,原因及解决方法



教程资讯
教程资讯排行









