
pc运动控制系统,PC运动控制系统的设计与实现
时间:2024-10-26 来源:网络 人气:
PC运动控制系统的设计与实现
随着工业自动化程度的不断提高,运动控制系统在各个领域中的应用越来越广泛。PC运动控制系统凭借其强大的计算能力和丰富的软件资源,成为运动控制领域的重要发展方向。本文将介绍PC运动控制系统的设计与实现,包括系统架构、硬件选型、软件设计等方面。
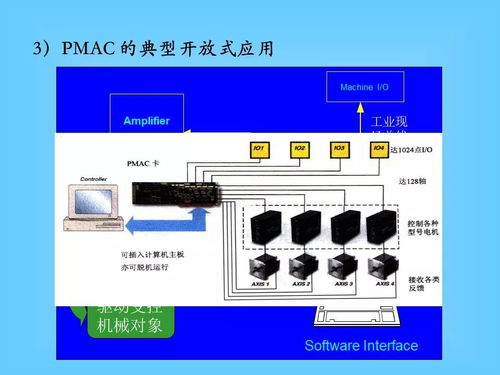
一、系统架构
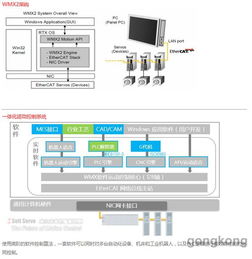
PC运动控制系统通常采用分层架构,主要包括以下层次:
感知层:通过传感器获取运动过程中的各种信息,如位置、速度、加速度等。
控制层:根据感知层获取的信息,通过算法计算出控制量,实现对运动过程的控制。
执行层:根据控制层的指令,驱动执行机构完成运动任务。
人机交互层:提供用户界面,方便用户进行系统配置、参数设置、监控等操作。
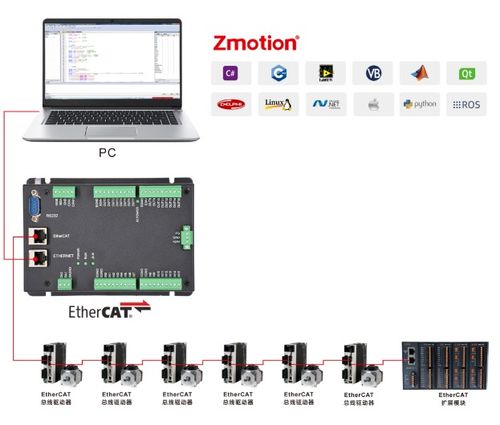
二、硬件选型
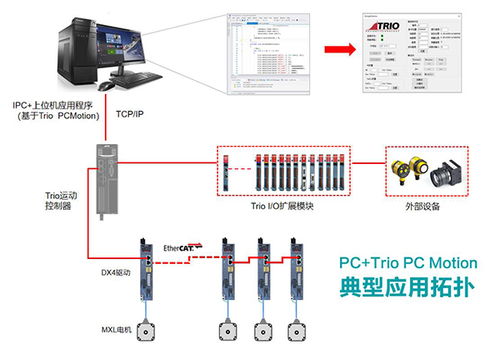
PC运动控制系统的硬件选型主要包括以下方面:
运动控制器:选择具有高性能、高可靠性的运动控制器,如DSP、FPGA、ARM等。
传感器:根据实际需求选择合适的传感器,如编码器、磁编码器、光电编码器等。
执行机构:根据运动任务选择合适的执行机构,如步进电机、伺服电机、液压缸等。
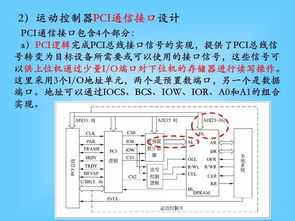
通信接口:选择具有高速、稳定通信能力的接口,如以太网、串口、USB等。
三、软件设计
PC运动控制系统的软件设计主要包括以下方面:
运动控制算法:根据实际需求选择合适的运动控制算法,如PID控制、模糊控制、神经网络控制等。
人机交互界面:设计简洁、易用的用户界面,方便用户进行系统配置、参数设置、监控等操作。
数据采集与处理:实现实时采集运动过程中的各种信息,并进行处理和分析。
故障诊断与处理:实现对系统故障的实时监测、诊断和处理。
四、实例分析
以下以一个简单的PC运动控制系统为例,介绍其设计与实现过程。
1. 系统需求分析
本系统主要用于实现一个机械臂的运动控制,要求机械臂能够完成简单的抓取、放置等任务。
2. 硬件选型
运动控制器:选用基于ARM架构的运动控制器,具有高性能、低功耗等特点。
传感器:选用磁编码器,用于检测机械臂的位置信息。
执行机构:选用伺服电机,用于驱动机械臂的运动。
通信接口:选用以太网接口,实现上位机与运动控制器之间的通信。
3. 软件设计
运动控制算法:采用PID控制算法,实现对机械臂位置的精确控制。
人机交互界面:设计一个简单的图形界面,用于显示机械臂的位置、速度等信息,并允许用户进行参数设置。
数据采集与处理:实时采集磁编码器的位置信息,并计算机械臂的实际位置。
故障诊断与处理:实现对系统故障的实时监测,并在发生故障时给出相应的报警信息。
PC运动控制系统具有强大的计算能力和丰富的软件资源,在运动控制领域具有广泛的应用前景。本文介绍了PC运动控制系统的设计与实现,包括系统架构、硬件选型、软件设计等方面,为相关领域的研究和开发提供了参考。



教程资讯
教程资讯排行









